基于巨磁电阻 (GMR) 的 Allegro IC
作者:Bryan Cadugan,
Allegro MicroSystems, LLC
摘要
Allegro MicroSystems, LLC 是开发、制造和销售高性能集成电路 (IC)的世界领先企业,其 IC 集成了高性能磁性传感器。本白皮书概述了巨磁电阻 (GMR) 效应的基本内容,以及 Allegro 如何在市场领先的 IC 中使用此技术来满足当今的应用需求。
巨磁电阻 (GMR) 效应
1988年,UnitéMixte de Physique CNRS/Thales 的 Albert Fert 和 Institut für Festkörperforschung Forschungszentrum Jülich GmbH 的 PeterGrünberg 发现了 GMR 效应。两人凭借此发现获得 2007 年诺贝尔奖。GMR 效应的基本原理是基于电子自旋。在磁阻器中,电子散射几率的增减是电子自旋态和电子行进所在介质的磁性方向的相互作用的函数。电子散射增加了电子流的平均自由路径,有效地改变了介质的电阻。总之,磁阻是一种在存在磁场变化的情况下阻值随之改变的电阻。
GMR 转换器的制造方法是创建一系列由不同磁性和非磁性材料制成的超薄层。这些材料的顺序和厚度使堆叠的薄膜(GMR 堆)可以在有磁场的情况下改变其电阻。
随着时间的推移,GMR 的技术进步发展出“旋阀”型结构,这是 Allegro 在其最新 IC 中使用的结构。在自旋阀中,两个磁性层中的一个作为“基准”,并固定器磁场方向,另一个层被称为“自由”层,可以自由地与周围环境中的磁场对齐(见图 1)。在典型的磁性传感器应用中,该磁场由磁体或电流产生,在本文的其余部分中称为 Bapp。“旋阀”这样命名是因为,它类似于水龙头,水流的速度与水龙头的旋转程度有关。GMR 旋阀的打开位置磁性层方向一致的时机(如图 1 中的方向 A 所示)有关,此时电阻最低。当磁性层反向对齐(如图 1 中的方向 B 所示)时,出现闭合位置(或低流量位置),此时电阻最高。对于“基准”层和“自由”层之间的任何角度差异,GMR 传感器的电阻与该角度的余弦成比例。
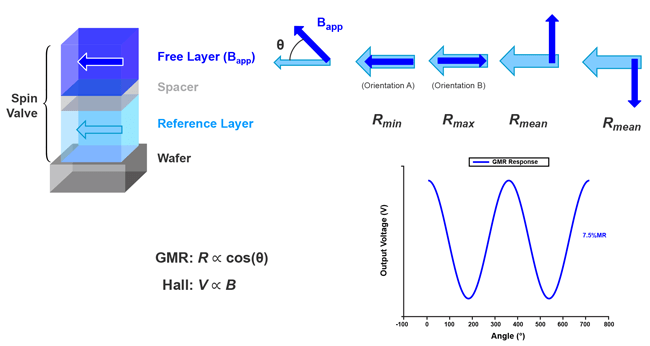
R = Rmin + (Rmin – Rmax) × cos(θ)
电阻变化的百分比称为 MR% 或磁阻百分比。Allegro 的 GMR 变换器的全范围场响应 MR% 通常是 5 - 8%。这种响应水平产生的信号比 Allegro 的霍尔效应变换器高约 50 倍,使用 GMR 变换器代替霍尔效应传感器可在 IC 中实现更高的信噪比。
GMR 响应
GMR 对电阻平面(即芯片表面或 IC 表面)施加磁场 (Bapp) 的本征响应与所施加
磁场角度的余弦成正比。但是,GMR 的电阻值并不总是表征磁场的强度。基本的 GMR 变换器更多的是磁性角度传感器(如图 1 所示)。然而,在
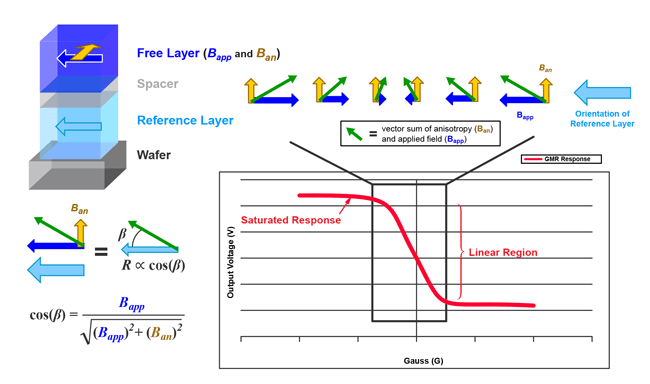
许多情况下,GMR 变换器需要对一个轴上的场进行线性响应。为了产生这种线性响应,与“基准”层产生 90 度的各向异性,
此基准场的行为就像另一个磁场,成为施加场累加矢量(这种各向异性引起的场 Ban,表示为 图 2 中的黄色箭头)。然后,该响应具有围绕零磁场状态的线性区域。Allegro 的许多 IC 使用这种线性化响应的方法。一定要注意在场响应范围任一极端情况下出现的饱和响应。在线性应用中,指定最大工作范围以解决杂散磁场和检测的磁激励。GMR 产品数据手册可以用来指示操作边界条件。有一点需要注意的是,Allegro 霍尔效应解决方案没有这种固有的饱和响应。Allegro 的霍尔效应 IC 具有基于应用或电路条件的饱和响应,这不是霍尔技术导致的。
在 IC 应用中使用 GMR
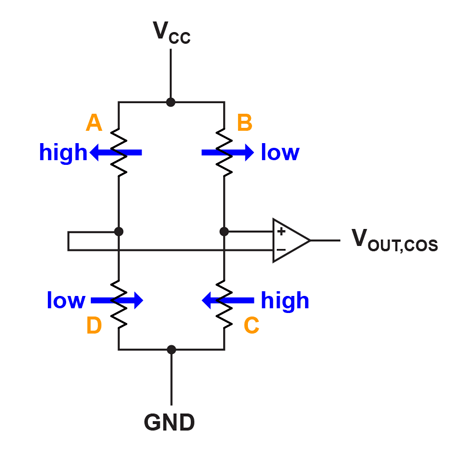
通常情况下,创建 GMR 电阻并将其置于惠斯通电桥配置中。惠斯通电桥的一半(图3中的元件 A 和 C)位于一个磁场条件下
,惠斯通电桥的另一半(元件 B 和 D)位于另一磁场条件下。理想情况下,这些条件表现出相等但相反的响应,以此使得惠斯通桥输出的信号最大。如图 3 中的蓝色箭头和文本所示,元件 A 和 C 以左方向(在本例中为反平行状态,在图 1 中表示为 Rmax)感测磁场,元件 B 和 D 以右侧方向(在本例中为平行状态,在图 1 中表示为 Rmin)感测磁场。结果是电阻器 A 和 C 将处于高电阻状态,并且 B 和 D 中的电阻器处于低电阻状态。差分输出将为正。
使用惠斯通电桥时,输出始终与所施加的 VCC 成比例,在没有施加磁场的情况下,差分输出的中点为 0V。差分电桥输出根据惠斯通电桥施加磁场的方向进行正向或负向摆动。这种电桥配置既可以消除温飘,也可以在一定程度上隔离杂散磁场。
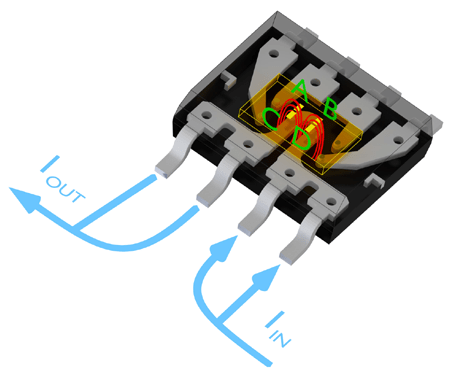
对于电流传感器,在一个方向上磁场在元件 B 和 D 保持相反的方向(见
图 4)。惠斯通电桥的输出馈送到差分放大器,然后通过 Allegro 的常用灵敏度和偏移校正电路,或进一步模拟或数字领域删除更先进的信号处理电路。在没有集成导体的其他应用中,利用 GMR 元件的物理空间分离来影响差分
信号,允许响应各种磁激励。
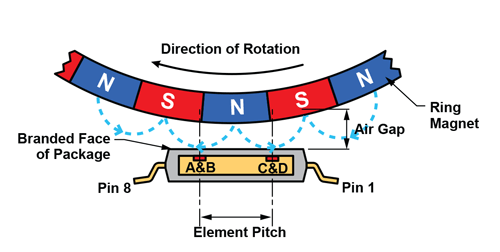
GMR 的另一个应用是用于环形磁铁速度检测应用,如 ABS 或变速箱传感器。如图 5 所示,用交替的南北极磁化来形成环形磁性材料。GMR 传感器可以放置在该材料的下面,使芯片平面水平。A 和 C GMR 元件以及 B 和 D GMR 元件之间的间距形成不同的磁场,并由这些元件组根据环形磁体在其旋转周期的位置来感测该磁场。当 N(北极)位于芯片上方中心时,磁场指向元件 A 和 C 上方左侧,以及元件 B 和 D 上方右侧。这将在 GMR 产生响应(如图 3 所示),并且 GMR 桥产生最大正响应。当在 S(南)极上方时,响应将是最大负值。当在极点之间时,每个元件的场大致相等,并且桥的响应接近 0。当环形磁体旋转时,这将导致传感器的正弦输出。通过对一定时间内的输出阈值的计数,可以测量环形磁体的速度。与传统霍尔传感器相比,在更大的气隙下能保证高灵敏度和一致性,以及更高的输出重复性,从而保证高精度的速度测量。
Allegro 拥有单片 GMR 解决方案
许多销售 GMR 解决方案的供应商都采用多芯片方法:“传感器”芯片和“接口”芯片。Allegro 是极少数直接将 GMR 技术集成在半导体晶圆
顶部的 IC 制造商之一。
这种集成方法具有许多优势,包括无需额外的芯片至芯片粘合,提高了可靠性,并且在集成载流线路或者将元件与外部参考相对定位时,可以简化整体设计。
晶圆至封装
由于 Allegro 的 GMR 解决方案本质上是单片式,GMR IC 晶圆的管理与霍尔效应传感器 IC 晶圆相同。将制造好的晶圆研磨至适合其封装的厚度,并将晶圆切割成合适的芯片尺寸。在此步骤之后,该器件采用 Allegro 标准系列半导体 IC 封装。
选择霍尔效应解决方案或 GMR 解决方案
GMR 变换器比霍尔效应变化器有一些优势。但是,了解这些变换器的理想应用非常重要,因为在许多情况下霍尔解决方案是更好的解决方案。
| 因素 | 霍尔效应 | GMR(基于 实例堆) |
| 灵敏方向 | 通过面(1 轴) | 在面内(2 轴) 通常 1 根主轴 |
| 响应 | 完美的一轴线性 | 2 轴余弦 型响应, 解释更复杂 |
| 灵敏度(固有) | ~10-20 μV / G | 0.5-2 mV / G (50+ X 霍尔效应) |
| 线性范围 | 非限制 | ±55 G |
| 响应范围 | 非限制 | ±100 G |
结论
Allegro 新集成 GMR 技术为设计人员提供了额外工具,可用于解决新的应用并扩展其 IC 在现有应用中的功能。GMR 能够改善信噪比、提高分辨率、或降低给定解决方案所需的场级别(较小的磁体、较大的气隙等)。此外,晶圆或 IC 表面的平面内感应能够创造比通过平面传感霍尔技术鲁棒性更强的新型、差分磁性解决方案。Allegro 将发布所有相关磁传感器 IC 产品组合的产品,以充分利用 GMR 技术提供的新功能。
本文中所含的信息不构成 Allegro 就本文主题而对客户做出的任何表示、担保、确保、保证或诱导。本文所提供的信息并不保证基于此信息的流程的可靠性,亦不保证 Allegro 已探究了所有可能出现的故障模式。客户负责对最终产品进行充分的验证测试,以确保该产品是可靠的,并且符合所有设计要求。