Allegro 角度传感器使用指南
作者: Simon Tima、Stéphane Réant、Loïc Messier 和 Andreas Friedrich (
Allegro MicroSystems, LLC)
介绍
不同行业的多种应用需要监控轴上或离轴设置中旋转轴的角度,例如工业自动化和汽车传感器和执行器。本应用说明专门针对轴上磁性应用。
磁传感器集成电路 (ICs=) 常用于执行这项任务。本文件将为使用基于圆形垂直霍尔 (CVH) 技术的角度传感器提供指南,角度传感器是本文中所述的各种 Allegro 角度位置传感器的核心。
角度测量系统设计基于特定应用的需要,例如气隙、精确度和温度范围以及传感器属性。本文件将介绍磁铁选择以及对决定系统准确性的影响因素的认识。
磁性角度测量系统主要有两个误差源。
- 传感器 IC 相关误差
- 磁性输入相关误差
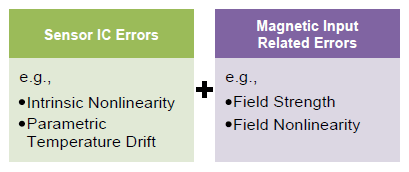
图 1:角度测量误差和来源
Allegro 传感器在生产过程中使用同质磁场进行测试和校准。因此可以在传感器发送给客户前尽量降低 IC 固有的非线性和温度漂移。温度漂移信息,请参阅产品数据表。
在设计中使用磁铁时,磁性输入将几乎不会同质,旋转范围内的磁场强度将不相同。这些误差与导致系统中出现测量误差的磁性输入有关。
磁场非线性和磁场强度会影响系统的总体误差。均取决于与感应元件相关的磁铁的机械位置。本文的后面章节将非线性描述为准确性误差(参考下文中的准确性误差定义)。
X/Y 感应机械尺寸定义
在笛卡尔坐标系中,传感器会作为一个基准,其封装表面平行于 X/Y 平面。将 CVH 传感器区的中心定义为原点 (0,0,0)。磁铁将绕 Z 轴旋转。
理想情况下,磁铁旋转轴将垂直于 X/Y 平面,原点 (0,0) 将不会有补偿。在下面的章节中,原点补偿将援引为“偏移”,换言之,图 2 中的偏移为零。
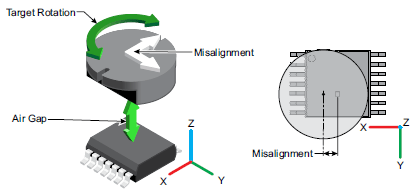
图 2:应用定位
磁体和传感器沿 Z 轴的距离通常称为气隙。参考图 6:参考详细的气隙定义。
感应元件位置
整个典型磁铁面上的磁场不均匀。需要在应用的机械设计中考虑磁敏 CVH 传感器的位置。数据表中定义了各 Allegro 角度传感器 IC 的 CVH 传感器的感应区。
图 4 中所示的双晶片设备中含有两个采用并排设置的相同芯片。这样可以为非常紧凑的封装提供冗余。
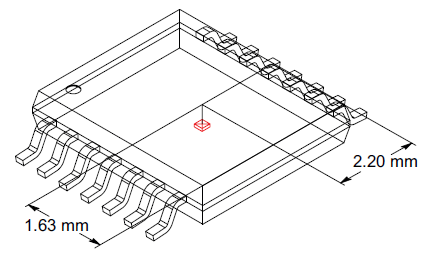
图 3:CVH 传感器在 TSSOP-14 封装中的定位
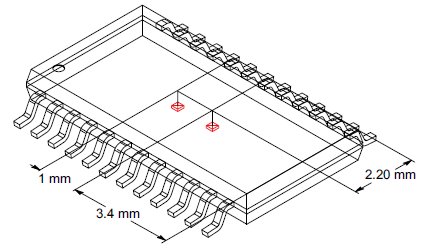
图 4:CVH 传感器在 TSSOP-24 双晶片封装中的定位
磁体选择
选择磁体不仅仅限于材料类型和尺寸;有一些基础形状将作为任意系统设计的良好起点。本文件后面的章节选择了三种磁体作为测量示例。
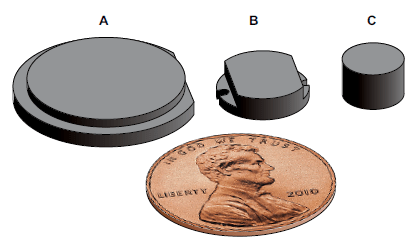
图 5:选择的三种磁体的尺寸比较
选择这些磁体示例来给出基本指南。图 5 中的磁体 1 A 和 B 是专门针对角度传感器而设计的,可以向德国 Magnetfabrik Bonn GmbH 购买。
磁体 C 是一种尺寸结构且完全磁化的简单磁片。表 1 中列出了磁体的部分特征。关于磁体材料和形状的具体问题,请联系首选磁体材料供应商。
| 磁铁 | A | B | C |
|---|---|---|---|
| 直径 | 18 mm | 9 mm | 6 mm |
| 高度 | 2.5 mm | 2.5 mm | 4 mm |
| 材料 | Sprox 13/21 p | Neofer 48/60 | Neofer 25/60 |
| 成分 | 硬铁氧体 + PA6 | NdFeB + PA11 | NdFeB + PA11 |
| 最高连续工作温度 2 | 160ºC | 140ºC | 140ºC |
| 剩磁温度系数 | -0.19%/K | -0.12%/K | -0.12%/K |
| 制造工艺 | 注塑成型 | 注塑成型 | 注塑成型 |
参数定义
气隙
谈到磁场传感器时,可以使用两种不同的气隙定义:封装气隙和晶体气隙。
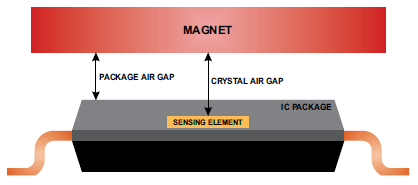
图 6:气隙定义
封装气隙
封装气隙定义为传感器外壳顶部到最近的磁体表面的距离。
晶体封装气隙
晶体气隙定义为传感器中的感应元件到最近的磁体表面的距离。
本文件中的气隙定义为晶体气隙。感应元件比封装顶部表面以下 0.36 mm。参考图 6。
角度误差定义
角度误差是指磁体实际位置和传感器装置测得的磁体位置之间的差。通过读取传感器输出并将之与高分辨率编码器 (参阅图 7) 比较进行测量。
E = α传感器 - α实际值
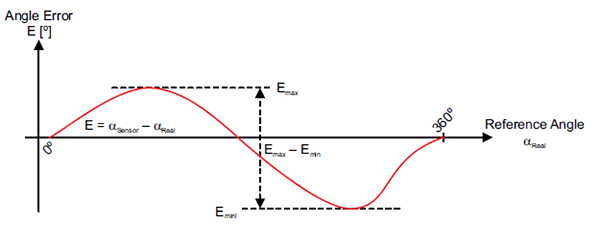
图 7:角度误差和精确度误差定义
精确度误差定义
在下文中,角度误差显示为偏移的函数。为此,需要引入全程旋转的单角度误差定义 (参阅图 7)。全程旋转的“总”角度误差定义为角度精确度误差,按照下述公式计算:
角度精确度误差 = (Emax – Emin) / 2
换言之,偏离理想直线的幅度在 0 度和 360 度之间。
平均磁场和气隙依赖关系
系统设计的第一步是为应用气隙选择适当的磁体。通常,气隙在 2 到 4 mm 范围内。图 8 中将磁场显示为关于图 5 中所示的磁体气隙的函数。
默认情况下,很多 Allegro 角度传感器经过调整,以在 300 高斯 (30 mT) 条件下提供理想的性能。但是,与其他角度传感器不同,Allegro 传感器可以针对 700 高斯 (70 mT) 的磁场强度专门调整。更多关于具体磁场强度调整的信息,请联系 Allegro 代表。
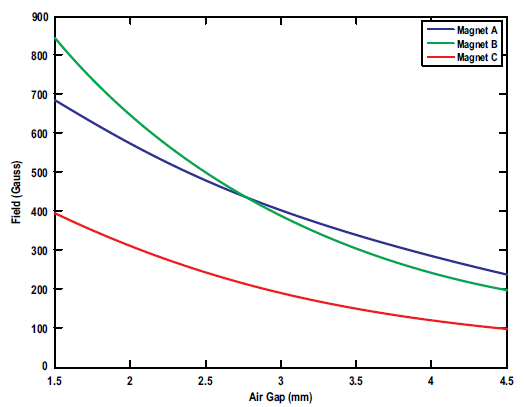
图 8:关于三个磁体气隙的磁场强度
图 9 到 11 显示了在使用参考磁体测试时 Allegro A1334 IC 的角度精确度误差。磁体在各个气隙至少旋转完整的一圈,并计算角度精确度误差。
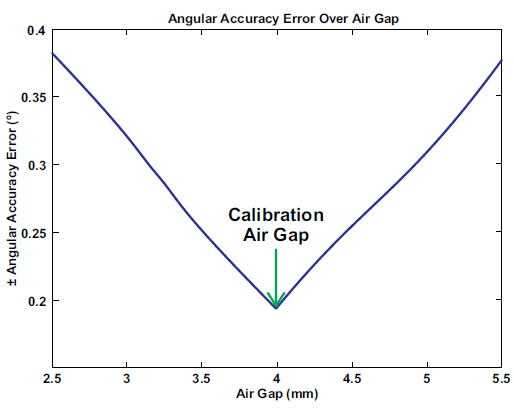
图 9:磁体 A 角度精确度误差与气隙
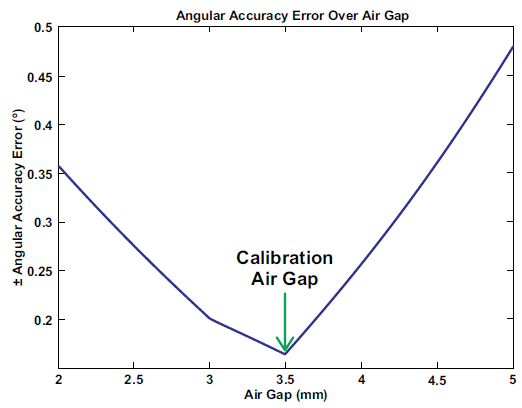
图 10:磁体 B 角度精确度误差与气隙
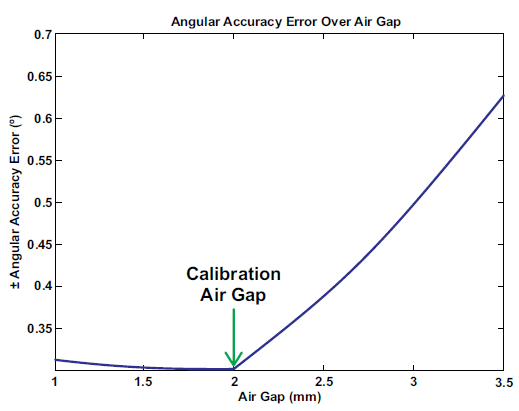
图 11:磁体 C 角度精确度误差与气隙
表 2 中汇总了理想气隙。
| 磁体 A | 磁体 B | 磁体 C | |
|---|---|---|---|
| 气隙 | 4 mm | 3.5 mm | 2 mm |
在所有三种情况下 (磁体 A、B、C),角度精确度误差受气隙影响。在校准气隙条件下达到的结果最佳,即磁场强度等于校准磁场强度 (300 G) 的距离处。注意图 9 到 11 中的刻度不同。
偏移容差
由于机械定位容差的关系,CVH 传感器不能始终准确定位在磁体中心。为了了解这种偏移如何影响测量角度的精确度,采用相对于直径不同的偏移来对各个磁体进行测试。
图中显示了大量测量结果。气隙设置为校准气隙 (参阅图 9 到 11)。磁体与 X/Y 远点的偏移可达 ±1.5 mm,取决于尺寸。在 X/Y 平面上的每个点,都计算完整一圈的角度精确度误差,并以彩色显示。在对比图 12 到 14 时,要注意刻度差异。
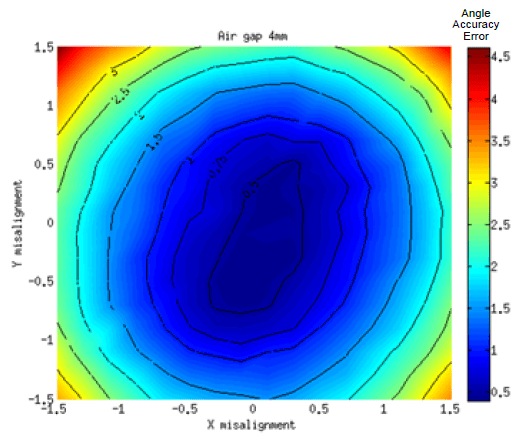
图 12:磁体 A 在气隙为 4 mm 时的角度精确度误差
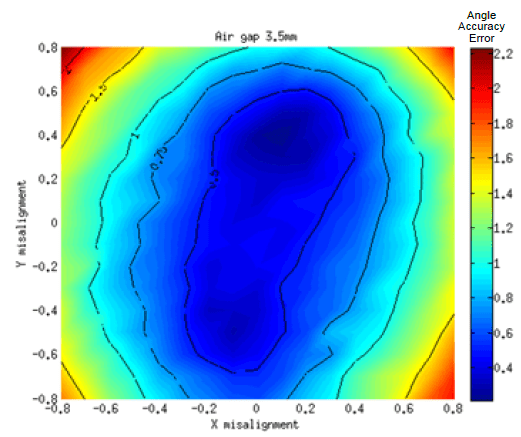
图 13:磁体 B 在气隙为 3.5 mm 时的角度精确度误差
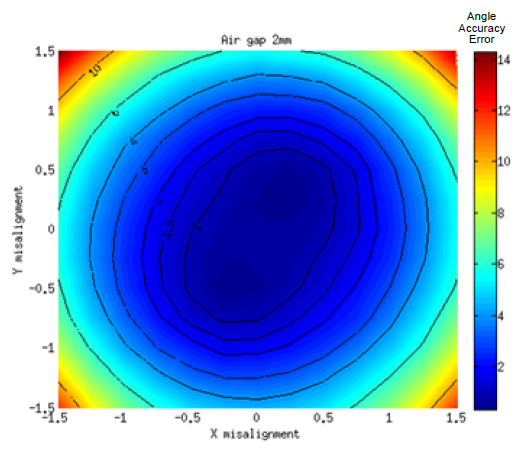
图 14:磁体 C 在气隙为 2 mm 时的角度精确度误差
测量误差汇总
图中解答了下述问题:
- 特定磁体和给定机械定位容差条件下预计可以达到什么样的精确度?
- 在给定精确度和机械容差条件下,应使用什么磁体?
- 对于给定磁体和精确度,允许使用怎样的机械容差?
| 角度精确度 | 磁体 A | 磁体 B | 磁体 C |
|---|---|---|---|
| 0.5º | ±0.5 mm | ±0.25 mm | ±0.1 mm |
| 1º | ±0.75 mm | ±0.65 mm | ±0.5 mm |
为了证明不同气隙条件下的偏移容差,分别对磁体 B 在 X 和 Y 轴上不同气隙条件下失准为 ±1 mm 的情况进行了绘图。图 15 和 16 证明气隙变化对偏移容差的影响很小。
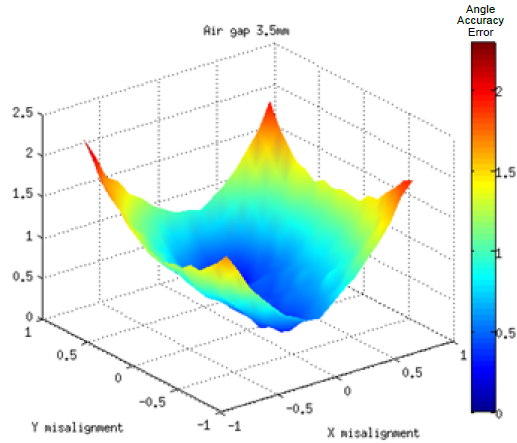
图 15:磁体 B 在气隙为 3.5 mm 时的角度精确度误差
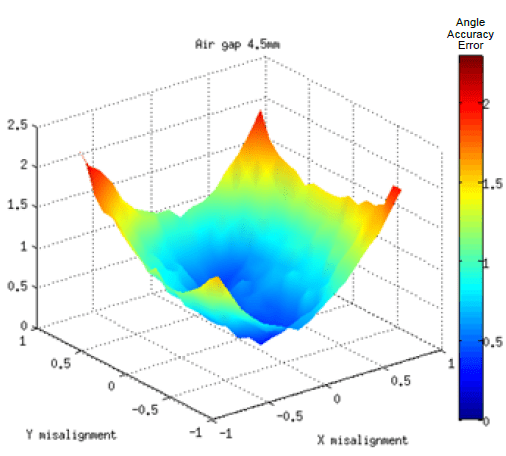
图 16:磁体 B 在气隙为 4.5 mm 时的角度精确度误差
可重复性
角度读数的可重复性取决于磁场输入的强度。高输入磁场会提高信噪比。将这一结果应用到磁力传感器表示在紧密气隙条件下可以达到最佳的可重复性。图 17 显示了不同磁体在角度读数为 100 的情况下的标准偏差。根据应用中取平均数的可能性,这一误差可以忽略。
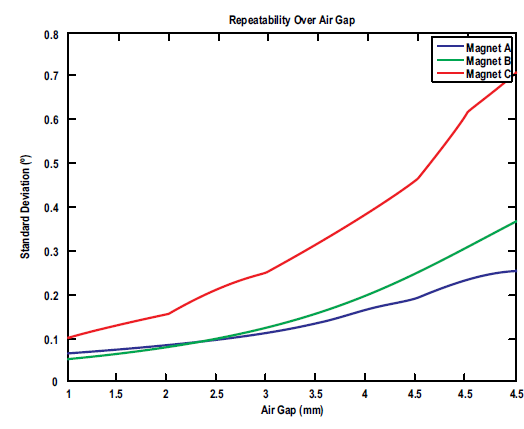
图 17:磁体 A、B 和 C 角度读数标准偏差与气隙 4
总结
特别是在严苛汽车或工业环境中,已经证明磁性角度传感器是传感器和执行器应用中的一种很有价值的解决方案。额外功能,例如线性化、诊断功能和冗余也支持高度安全攸关应用,例如汽车转向系统。
角度传感器的此路设计异常复杂,需要考虑很多影响参数。本文件提出了磁体选择、机械容差和轴上应用精确度要求之间的依赖关系。
其他问题或支持请联系 Allegro 代表。
1 Magnetfabrik Bonn 产品参考编号:67.043-2 和 67.043-1。
2 磁体材料和形状决定最高工作温度。允许在有限时间内超过这些额定值。联系供应商为应用温度曲线选择适当的磁体。
3 关于 300 高斯以外的特定输入磁场范围的可用选项,请联系 Allegro。
4 每个气隙测量 100 次(默认模式中的设备每个读数 1 个样本)。
于 2015 年 1 月首发于 《设计新闻》。