使用 ATS605LSG 的电动机驱动的磁体编码器设计
编制人:Yannick Vuillermet 和 Andrea Foletto,
Allegro MicroSystems Europe Ltd
前言
电动机控制系统中一般使用编码器对励磁信号进行同步。本应用说明描述了如何将 Allegro ATS605LSG 等霍尔传感器设备用作带铁磁目标的系统的编码器,并给出目标设计建议,以在每次输出时产生正交输出,实现50%的工作周期。
磁体编码器的优势
设计带电动机的系统时,反馈回路对于向电动机提供准确励磁、提升效率而言非常重要。电动机系统受到的限制常常不仅限于电气方面的限制;尺寸和磁性环境也可能影响整体性能。ATS605LSG 等磁体编码器的优势包括:
- 不受外部磁场干扰
- 构造简单
- 使用铁磁目标
- 汽车合规
- 系统尺寸
- 设计自由度
电动机驱动指南
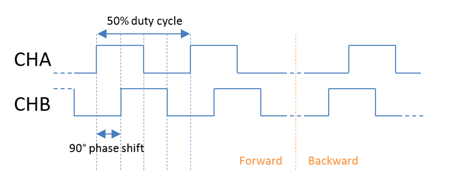
编码器在正交相位中提供两个信号,分别为 CHA 和 CHB(图 2)。这些信号用于向控制器提供所需的反馈,调整电动机励磁信号。
通用应用要求
每种应用中的机械目标的设计都可能不同。然而,一些参数可定义为编码器系统的通用要求,在大部分应用中保持不变:
- 工作周期精度 50% ±10%
- 相移精度 90° ±10°
- 0.5 至 3.0 mm 的气隙
- 温度范围 –40°C 至 150°C
本文件中提供的指导侧重于实现这些参数。
如需使用不同的参数,则将影响目标设计——请联系当地 Allegro 应用工程师对目标设计进行优化。
ATS605LSG 双差分高速传感器
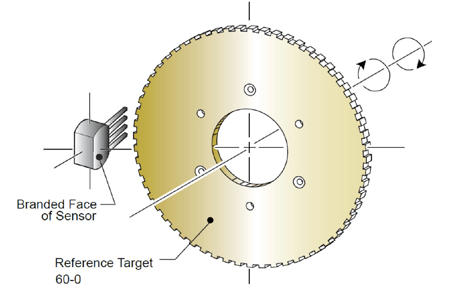
ATS605LSG 传感器是一个集成磁铁的双独立输出差分传感器。ATS605LSG 针对显示器速度和铁磁目标的方向而专门设计。
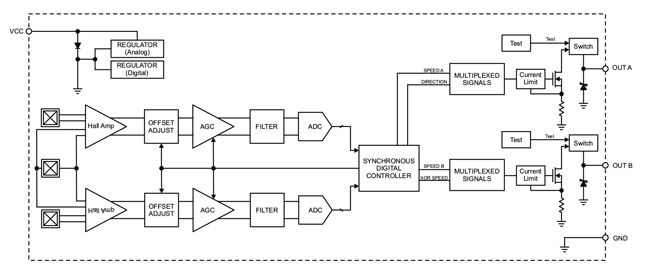
三个霍尔元件整合在一起,形成两个独立的差分通道(差分感测不受外部磁场影响)。这些通道由 IC 处理。IC 包含精密数字电路,可减少磁铁的不良影响和系统偏差。霍尔差分
信号用于产生高度准确的速度输出(图 3)。
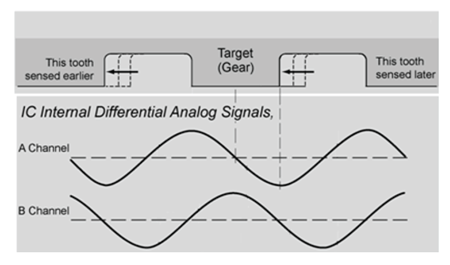
开漏输出提供电压输出信号,该信号映射感应到的目标的形状,按目标齿的大小与霍尔元件间隔的比例,在两个通道之间相隔一个相位,非常适合用于产生两钟正交信号(图 4)。
ATS605LSG 的最大工作频率为 fOPmax =40 kHz。在有 n 齿目标的情况下,最大转动速度 ω 为:
ω = (60 × fOPmax) / n [RPM] (1)
根据 ATS605LSG 数据表,最大运转差动磁场取决于输入磁场频率 fOP:fOP ≤ 10 kHz 时的最小磁场为 30 G,fOP >10 kHz 时的最小磁场为 60 G。
设计目标时的参数定义
设计机械目标时需要考虑各种参数。本应用说明将分析目标节距和齿/节距比等机械目标几何尺寸对 ATS605LSG 用作编码器时的性能的影响。
下列参数会影响切换点的准确度,因此也会影响 ATS605LSG 的性能。
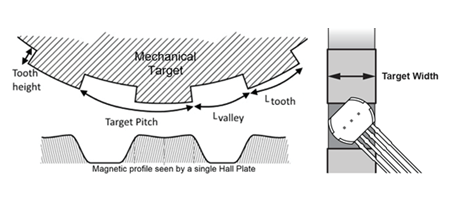
目标节距 [mm]: 指轮齿到谷底的长度(图 5),代表一个机械周期的距离。
目标宽度 [mm]:定义为机械目标的宽度或厚度(图 5)。
齿/节距比 [无单位]:指轮齿长度与轮齿及谷底长度之和的比。
比率 = L轮齿 /(L轮齿 + L谷底) (2)
气隙 [mm]:指 ATS605LSG 传感器印记面和轮齿顶部之间的距离。
霍尔板间距 [mm]:指用于生成差分信号的两个霍尔板之间的距离。ATS605LSG 中两个通道的间距为 1.75 mm。
在以下分析中使用下列固定参数:
目标节距:5 mm
矩形齿形状:如图 5 所示
齿高:3 mm
温度:150°C(最恶劣情况下的温度)
目标外径(包括齿)称为 OD,单位为毫米。
请注意,本次分析中的所有结果都来自磁场模拟。模拟绝对准确度高于 10%。
相分离和工作周期分析
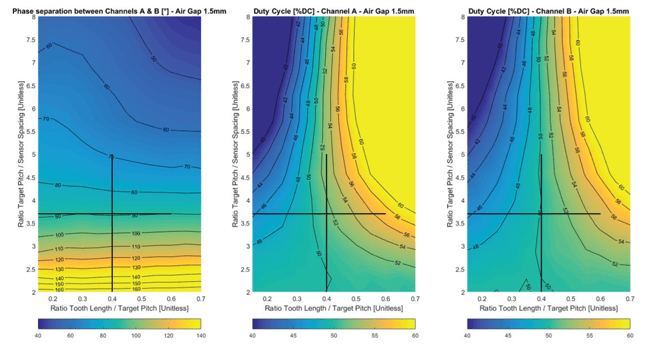
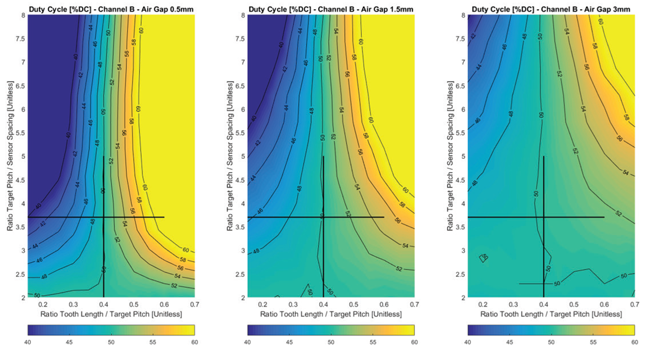
机械限制一般会固定目标直径和气隙范围。可以调整以满足编码器要求的参数为目标节距(与齿数相等)和齿/节距比。本章节分析 1.5 mm 气隙条件下的工作周期(对于 A 和 B 两个通道)及其相分离,以及目标节距和齿/节距比。
纵轴显示目标节距和霍尔板间距(ATS605LSG 固定为 1.75 mm)之比。如需调整目标节距和霍尔板间距之比,扭转 ATS605LSG 即可(请见传感器扭转部分)。横轴代表齿/节距比。
图 6 中的平面图可用于判断哪些参数影响工作周期和相分离,并选择适当的目标距和齿/节距比。
左起第一张平面图说明了通道之间的相分离。它与齿/节距比保持相对稳定。1.5 mm 气隙条件下,最优的目标节距/间距大约为 3.7。这相当于常规的 1.75 mm 传感器间距时的 6.45 mm 目标节距。
然后即可计算齿数(n 是自然数):
n = (π × OD) / 节距 ≈ 0.49 × OD (3)
本示例中的齿数已针对 1.5 mm 的气隙优化,如特殊的应用需要,可针对其他气隙优化。
温度不会影响相移和工作周期,仅影响最大气隙。
一旦设定目标节距,即可基于理想的工作周期决定齿/节距比。对于编码器系统,工作周期应该尽可能接近 50%。图 6 中间和右侧的平面图说明,选择 0.375 左右的比率即可实现这一点。为简单起见,分析中使用的比为 0.4。
请注意,虽然传感器 IC 对称,但通道 A 和通道 B 图形不同:这是由于目标通过传感器前方时的磁场边缘效应。
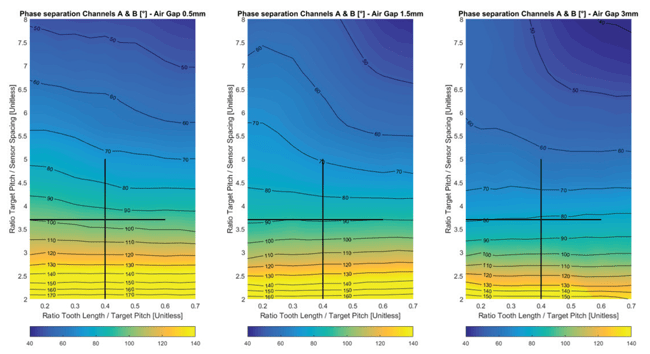
气隙影响
本章节分析了气隙对系统准确性的影响。下面的平面图显示了三个不同气隙情况下两个通道的相分离和工作周期:0.5 mm、1.5 mm 和 3.0 mm。
从这些情况中可以观察到,相分离取决于气隙。
使用上一章节选中的参数,可以看到,相转变从气隙 3 mm 时的 81° 转变为气隙 0.5 mm 时的 96°。仍然在 90 ±10° 规格的范围内。
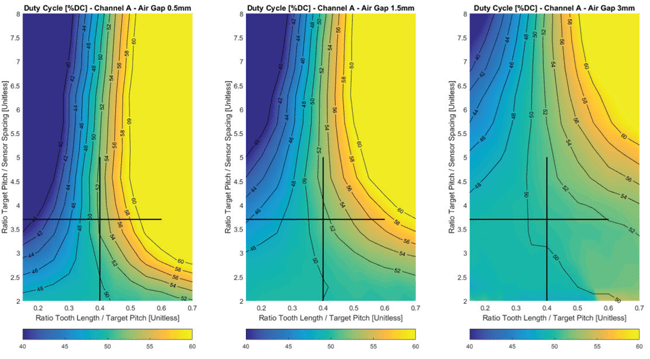
工作周期平面图(图 8 和图 9)说明,提高气隙会让工作周期约 50% 的区域变大。因此,应该在气隙较小时确定齿/节距比,以确保完全的气隙能力。这些图表确认了之前章节(相分离和工作周期分析)中提议的气隙 1.5 mm 下 0.4 的比率。应注意的是,50% 的工作周期位置相对于气隙保持稳定。因此,如设计适当,50% 的输出工作周期不会被气隙变化影响。
目标节距和齿高建议
为保证在气隙下表现良好性能,建议使用至少 5 mm 的目标节距和超过 3 mm 的齿高。如果在应用中,在机械角度而言不可行,则请联系当地应用工程师,评估预期性能。
各种目标直径的最大气隙、相转换、最优齿数
下表说明了给定目标外径的最优齿数及预期气隙和相分离性能。
请注意,给出了两个气隙范围:最小运行信号独立于输入磁场频率 fOP,如上文所述。
这些结果适用于 5 mm 目标节距,3 mm 齿高,矩形齿形和 –40° 至 150°C 的温度范围。
请注意,近似关系 n ≈ 0.49 × OD 已经足以准确猜出齿数,无论外径大小。
| 目标外径 [mm] |
最优齿数 |
齿/节距比 | fOP >10 kHz 时的最大气隙 [mm] |
fOP ≤ 10 kHz 时的最大气隙 [mm] |
0.5 mm 到 2.5 mm 的相分离 [°] |
0.5 mm 到 3.0 mm 的相分离 [°] |
| 60 | 30 | 0.4 | 2.4 | 2.9 | 90 ±9 | 90±10 |
| 70 | 35 | 0.4 | 2.4 | 2.9 | 90 ±9 | 90 ±9 |
| 80 | 40 | 0.4 | 2.4 | 2.9 | 90 ±9 | 90 ±9 |
| 90 | 44 | 0.4 | 2.4 | 2.9 | 90 ±6 | 90 ±9 |
| 100 | 49 | 0.4 | 2.4 | 2.9 | 90 ±6 | 90 ±9 |
| 110 | 54 | 0.4 | 2.4 | 2.9 | 90 ±6 | 90 ±8 |
| 120 | 59 | 0.4 | 2.4 | 2.9 | 90 ±6 | 90 ±8 |
| 130 | 64 | 0.4 | 2.4 | 2.9 | 90 ±6 | 90 ±7 |
传感器扭转
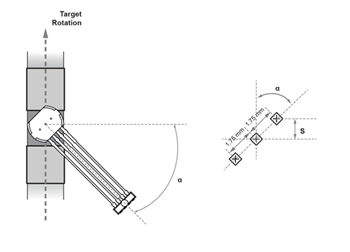
根据上文章节,两个输出均为正交输出的齿数与目标外径具有本质联系。然而,应用可能需要更高的齿数来改善编码器解析度。为在不改变目标直径的情况下实现这一点,可以按图 10 所示扭转传感器。按照以下公式,这一简单的操作可减少霍尔板间距:
S = 1.75 × cos α
其中 1.75 mm 是 ATS605LSG 的霍尔板间距。
霍尔板在目标旋转平面(图 10)上的投射成为新的霍尔板间距 S。S 是目标以虚拟方式看到的间距。
然而,扭转传感器可能会减小最大气隙。此外,目标宽度必须够大,以便保持霍尔板位于目标之上。
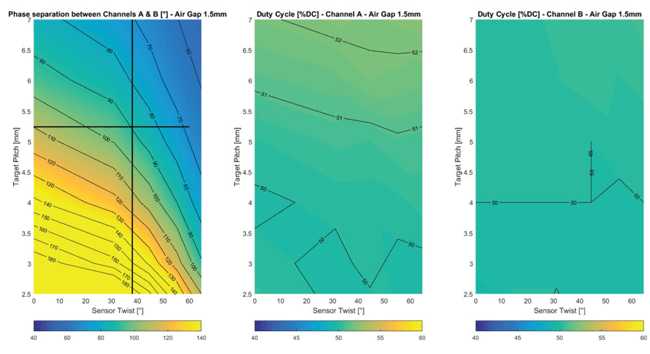
如图 11 所示,在齿/节距比为 0.4 时,传感器扭转会影响相分离。但工作周期不会受到传感器扭转的影响。请注意,图 11 中央平面图和右侧平面图中可见的“噪音”并不是真正存在,而是仅仅来自于模拟解析。
下表显示了当齿/节距比为 0.4 时,获得 90° 相分离与传感器扭转所需要的最大气隙和距。
| 目标节距 [mm] | 传感器扭转实现 90° 相分离 [°] |
对应的表面间距 S [mm] |
fOP > 10 kHz 时的最大气隙 [mm] |
fOP ≤ 10 kHz 时的最大气隙 [mm] |
| 6.45 | 0 | 1.75 | 2.4 | 2.9 |
| 6.15 | 10 | 1.72 | 2.3 | 2.8 |
| 5.90 | 20 | 1.64 | 2.3 | 2.8 |
| 5.65 | 30 | 1.52 | 2.1 | 2.6 |
| 5.25 | 38 | 1.38 | 2.0 | 2.5 |
| 5.10 | 40 | 1.34 | 2.0 | 2.4 |
| 4.40 | 50 | 1.12 | 1.8 | 2.2 |
| 3.55 | 60 | 0.88 | 1.4 | 1.8 |
作为使用传感器扭转的例子:假设应用使用 100 mm 外直径的目标,为解析目的而需要 60 齿。目标的最大转速为 10,000 RPM。
根据等式 3,达到 90° 相分离的最优齿数为 49。
这个齿数与这个应用不兼容。因此,有必要扭转传感器。在这种情况下,60 齿的目标节距为:
节距 = (π × OD) / n = 5.24 [mm] (4)
根据左表或图 11 左侧的平面图,所需扭转为 38° 方能达到 90°。
由于最大输入频率为 10 kHz(见等式 5),应用中的最大气隙为 2.5 mm,而不是没有传感器扭转时的 2.9 mm。
fOP = (n × ω) / 60 [Hz] (5)
结论
本应用说明对于建立使用高速 ATS605LSG 传感器的磁体编码器系统提供了指南,并展示了实现 90° 相和 50% 工作周期的最佳配置是约 6.45 mm 的目标距和 0.4 的齿/节距比。
如果目标节距不是 6.45 mm,并且无法改变,则可以通过谨慎选择的传感器扭转实现通道间 90° 的相移。